What? Working solo, built a 2-foot robotic arm with cable-driven control to achieve fluid, snake-like motion for precise object manipulation and inspection tasks. The arm features a unique segmented design with multiple distributed disks connected by a central PVC backbone, allowing it to achieve complex 3D movements by precisely controlling antagonistic cable pairs.
How? First prototyped a 10-inch test arm in SolidWorks and fabricated with 3D printed parts to validate the mechanical design and test different disk spacings and cable routings. After testing with servos revealed the need for more torque, scaled up to the final 2-foot design using Nema 23 stepper motors with 30:1 Worm Gearboxes. Custom designed and 3D printed all major components including the segmented disks, cable routing system, and mounting hardware. For electronics, stripped computer power chord for a 24V source powering an Arduino-based control system with stepper drivers. Wrote custom software enabling both manual joystick control and programmable autonomous positioning.
Results? Successfully achieved smooth, precise motion control with the ability to perform complex spatial movements. Received a $1000 grant from the 1517fund for continued development. Created a Youtube demo video showcasing the arm's capabilities here. Currently working on a detailed build guide to document the entire development process...
What? CAD design, fabricate, and assemble a drivetrain capable of going ~25 mph with a low center of gravity and high manueverability.
How? Used SolidWorks to 3D model and 3D printed various parts out of Nylon x Carbon Fiber filament. Implemented mk4i swerve modules for high manuverability.
Results? Design worked as intended with a top speed of 25 mph and low center of gravity. Qualified for FIRST World Championship.
What? Assisted a college student Hudzah with building a Farnsworth Fusion Reactor in his dorm.
How? Helped with soldering wires, debugging arduino code, jerry-rigging a battery pack, and completely fried a transformer....
Results? Hudzah succesfully achieved fusion! Check out @hud_zah on twitter for more details!
What? Modify a hair-spray Potato Cannon into a Butane fueled Rocket Launcher.
How? 3D designed the cannon and various possible shapes of ammunition and sabots using Onshape. Assembled combustion chamber (2ft) and barrel (6ft) with pvc pipes and sparked the butane with a grill igniter.
Results? Achieved a horizontal distanec of 230ft with the cannon at a ~25° angle from the ground.
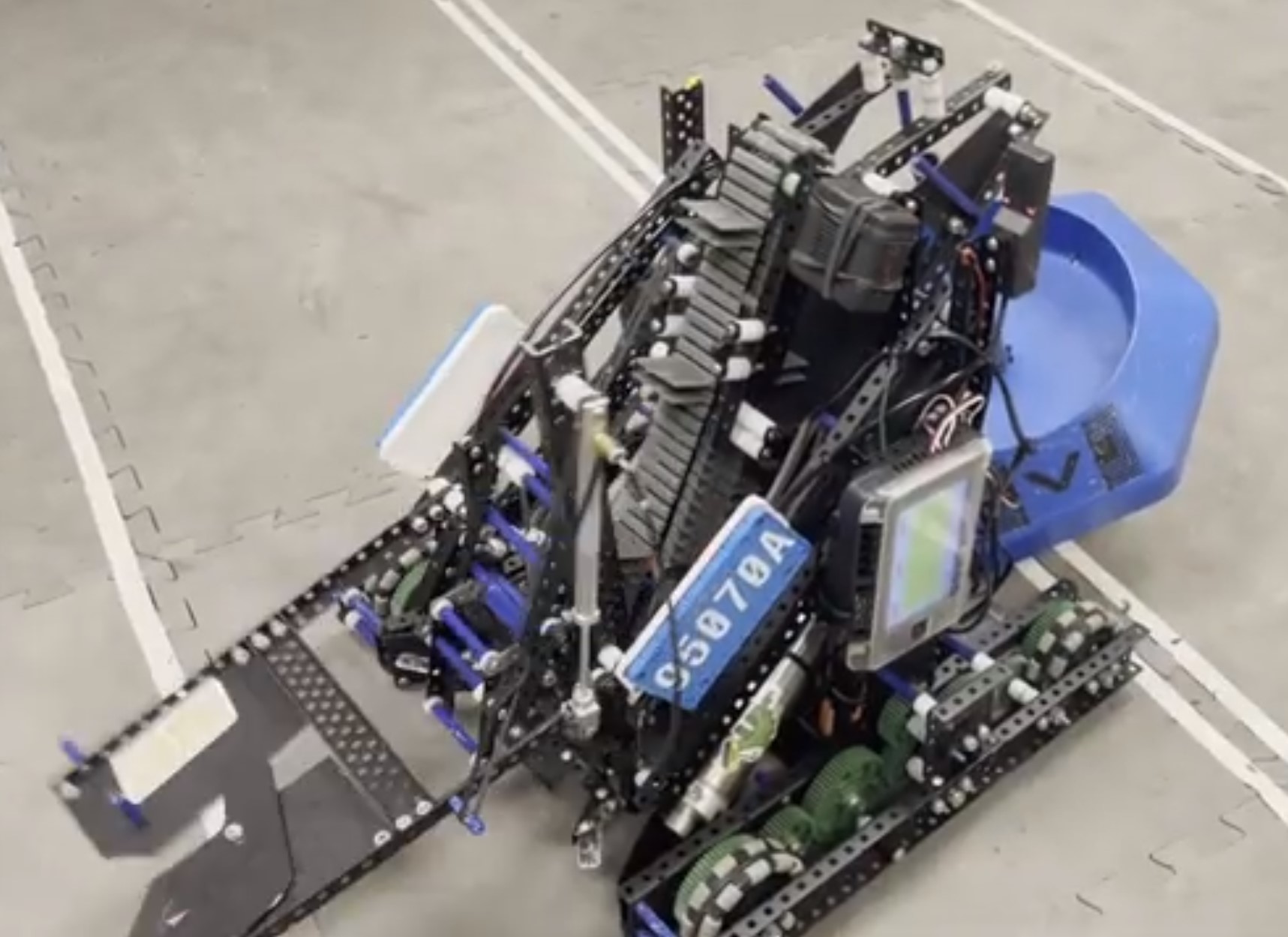
What? Build a small competitive robot with a chassis, mechanisms to clamp, 4 bar lift, and a conveyor belt intake. .
How? Used V5 motors and various vex parts for the drivetrain, lift, and intake. Used V5 Pneumatics for clamping mechanisms as well as additional flip out mechanism to prevent opponents from scoring. Went through countless stages of prototyping and went to many competitions to perfect a final design.
Results? All mechanisms worked as intended, with our team winning the U.S. Open Competition, a NorCal State Competition, a Google Signature Competition and others.

What? Built a custom rocket using the same oxidizer as NASA's twin SLS solid rocket boosters (Ammonium perchlorate).
How? Designed multiple types of nose cones and fins in Onshape and assembled with PVC body tube and nozzle.
Results? Ignite rocket engine into the ground and combustion lasted a long 28 seconds despite the low amount of fuel grains added.

What? Coded an open world first person shooter style game with the goal of fighting off enemy deer.
How? Used Unity and VScode to create the game structure as well as public assets on the Unity Asset Store for 3D models.
Results? Movement for player and NPC's are fully functional as well as an enemy AI with different objectives based on distance from player. Proper game loop, health system and UI still in progress...
